

We are pleased and proud to share with you the information about the publication of the Polish creators of SARUAV in the international high-scoring scientific journal "Remote Sensing" 2021, 13(23).




SPEED, EFFICIENCY AND PRECISION
FUNCTIONALITY AND EFFECTIVENESS
COMPLEMENTING EXISTING PROCEDURES

UAV and IT technologies are able to support search for missing persons and they SHOULD be in use.
FREQUENTLY ASKED QUESTIONS
_________
WHICH COUNTRIES DOES SURUAV SERVE?
Albania, Austria, Belgium, Bosnia and Herzegovina, Bulgaria, Croatia, Cyprus, Montenegro, Czech Republic, Denmark, Estonia, Finland, France, Germany, Greece, Hungary, Iceland, Ireland, Italy, Kosovo, Latvia, Liechtenstein, Lithuania, Luxembourg, Malta, Netherlands, Norway, Portugal, Romania, Serbia, Slovakia, Slovenia, Spain, Sweden, Switzerland, Turkey, United Kingdom
WHAT IS THE LICENCE FOR THE SARUAV SYSTEM?
SARUAV sp. z o.o. grants an annual and spatially limited licence. This is both a legal restriction (licence conditions) and a technical restriction: dedicated spatial data must be prepared for each implementation, and automatic human detection operates in the area defined by the Customer.
WHAT DOES THE PRICE OF AN ANNUAL LICENSE DEPEND ON?
When calculating the price of the annual licence, several factors are taken into account, such as the area, the number of computer stations where the system is to be installed and whether the customer represents a voluntary or professional organisation or a company.
Each implementation requires a separate assessment, taking into account the customer's expectations regarding the number of workstations with the SARUAV system and the guarantee and service conditions.
WHAT DOES THE SYSTEM IMPLEMENTATION PROCESS LOOK LIKE?
At this stage each implementation is carried out personally, on a single computer provided by the Customer. The system is installed on this computer, it undergoes additional detailed tests and then the computer is handed back to the Customer.
IS THE SOLUTION SUBJECT TO WARRANTY AND SERVICE?
Due to the fact that the choice and purchase of a drone and computers remain with the Customer, during the duration of the licence we service only the software developed by SARUAV sp. z o.o.
WHAT PARAMETERS MUST THE COMPUTER TO OPERATE THE SYSTEM MEET?
The laptop requirements are as follows:
| MINIMUM REQUIREMENTS | OPTIMAL REQUIREMENTS | |
| GPU | NVIDIA Geforce GTX 1660 6GB | NVIDIA Geforce RTX 2060 6GB |
| CPU | Intel i5 or AMD Ryzen 5 | Intel i7 or AMD Ryzen 7 |
| RAM | 8 GB | 16 GB |
| HDD | Depending on the size of the deployment (minimum 10GB of disk space for the size of a province or 40GB for the size of Poland) | Depending on the size of the deployment (minimum 10GB of disk space for the size of a province or 40GB for the size of Poland) |
| SOFTWARE / DRIVERS |
Windows 10, current graphics card drivers, CUDA Toolkit software, Microsoft Visual C++ Redistributable library | Windows 10, current graphics card drivers, CUDA Toolkit software, Microsoft Visual C++ Redistributable library |
WHAT ARE THE RECOMMENDATIONS FOR THE CAMERA MOUNTED ON THE DRONE SO THAT THE DETECTION CAN BE CARRIED OUT CORRECTLY?
E90 for H520
E90X for H520E and H520E RTK
and
DJI FC2403,
DJI ZENMUSE Z30,
DJI FC6510,
DJI FC6310,
DJI FC6310S,
DJI FC2204,
DJI ZH20T,
DJI ZH20,
DJI FC6310R,
DJI FC3170,
DJI FC3411,
DJI MAVIC2-ENTERPRISE-ADVANCED,
Canon PowerShot S110,
Autel Robotics XT705,
Autel Robotics XT701,
Autel Robotics XT709,
Hasselblad L1D-20c
New cameras can be added, but this requires the procedure described below. In order to check the compatibility of the new camera, a photogrammetric flight meeting the conditions described in the following section must be performed.
FLIGHT
- JPG nadir images
- lateral coverage: 60-70%
- longitudinal coverage: 80%
- terrain pixel size (ground sampling distance, GSD): 1-2 cm/px (2-3 cm/px as a last resort, but not quite optimal GSD)
- horizontal platform velocity: 2.5-3.0 m/s
These are, of course, easy conditions to meet in practice. The operator is responsible for the safety of the flight. Such a flight is sufficient for the operational detection of people, for which a launch site is still required.
COMPATIBILITY CHECK
To check compatibility, we additionally need (in addition to photos and the location of the take-off point) information about the drone's altitude above the take-off point (one value above the take-off point, not the altitude of the platform in flight during photos).
In summary, to start working with the SARUAV software we require checking: (1) whether the customer has a laptop with the required specifications, (2) whether the customer has a camera included in the list above (if not, we start the procedure to add a camera). Usually we ask clients to collect data even if the camera is on the list - we then do tests and finally confirm that everything works (there were situations when the platform manufacturer changed the way metadata is stored in a particular camera/platform during an update).
__________
WHAT ARE THE RECOMMENDATIONS FOR TAKING AERIAL SHOTS?
Aerial photographs should be shots of the terrain taken from above, with the camera pointed vertically downwards and the lens positioned vertically towards the terrain. Acquisition of aerial photographs should be done in accordance with recommendations commonly accepted in low-altitude photogrammetry, i.e. transverse and longitudinal coverage, e.g. 60/80%, so that each point is registered on several photographs. Such a high coverage ensures that every point is captured in the images from different directions and at different angles, so the possibility of overlooking a person is minimised. Large coverage does not significantly affect the duration of the analysis.
In addition, the altitude of the flight carried out should be adapted to the parameters of the camera mounted on board the UAV, so that the acquired images are of high field resolution. For detection to be as effective as possible, camera parameters and flight altitude should be adjusted to capture images with a field pixel size of less than 3 cm/px. In simple terms, this means that the width of one pixel in the image corresponds to a field distance of 3 cm or less.
__________
IS IT POSSIBLE FOR THE SYSTEM TO DETECT PEOPLE ON THE BASIS OF FILM RECORDINGS?
No. Videos are not processed by the system. The system is fed with a set of nadir aerial images taken in accordance with commonly accepted recommendations in low-altitude photogrammetry (transverse and longitudinal coverage at the level of 60/80%).
__________
DOES THE SYSTEM USE INFRARED IMAGERY AND VIDEO?
No. Our two detection algorithms work in parallel, only on nadir and RGB images. Our near-infrared (NIR) tests gave less satisfactory detection results.
We also do not work on images taken in the far infrared - thermal imaging. They have insufficient resolution from the perspective of our algorithms.
__________
DOES THE SYSTEM WORK AT NIGHT?
Our detection algorithms work on high-resolution RGB images, so their application for images recorded at night is a certain limitation. Even if it is possible to perform night flights from a legal perspective, the images acquired during such a flight are often of too poor a quality for detection to be possible.
An exception may be areas very well illuminated by artificial light, or performing raids with an additional source of strong light, mounted on an unmanned aircraft. Such a spotlight could be directed downwards to illuminate the area to be photographed, and flights should take place at an altitude allowing sufficient illumination, while maintaining all safety conditions. SARUAV has plans to test images acquired in this way, but this has not yet been done.
__________
WHAT IS THE DATA PROCESSING MODE AND WAITING TIME FOR ANALYSIS RESULTS?
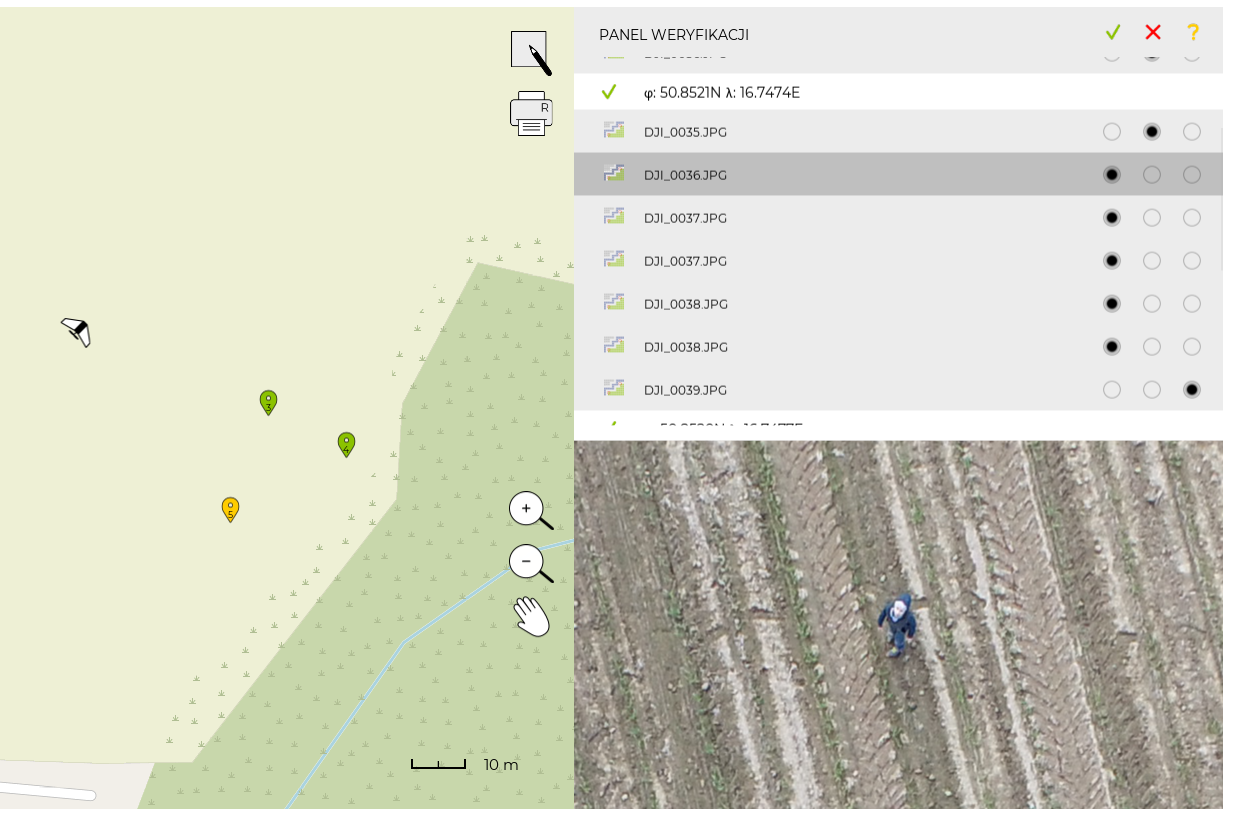
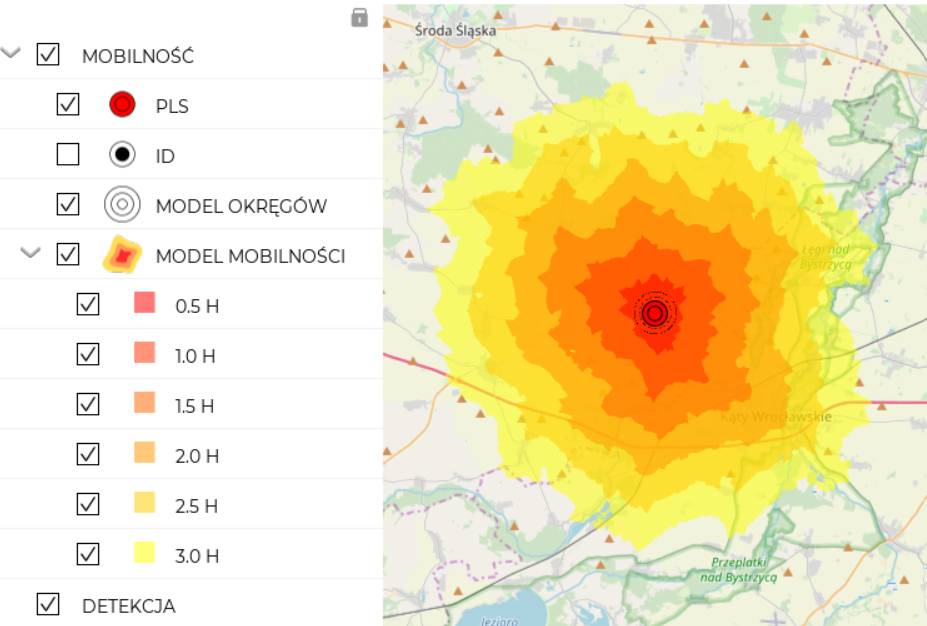
Maps of the theoretical range of human movement, as well as maps with automatically indicated locations of human-like objects are created in real time on a high-speed laptop operating completely offline, without Internet access.
Detection of people in the images is possible after the unmanned aircraft has landed and the images are ripped from it onto the laptop on which the system is installed. For example, detection on about 100 aerial images with full visualisation is realised in 2-3 minutes.
__________
DOES THE SYSTEM AUTOMATICALLY GENERATE DRONE FLIGHT PATHS?
No. The selection of the area to be flown can be made on the basis of recommendations obtained in the system, but the final decision as to where the drone should be sent rests with the people responsible for planning the search. They are the ones with the relevant management experience and are responsible for the optimal allocation of resources in the field.
The responsibility for planning the paths and carrying out the flight correctly rests with the drone operator and is carried out in applications independent of the SARUAV system, dedicated to specific UAVs.
___________
IS IT POSSIBLE FOR THE SYSTEM TO WORK IN REAL TIME?
The default mode of operation of the detection module is as follows: the drone takes pictures (the SARUAV system does not control the drone, and the raid is carried out by an operator), lands, we pull out the card or connect the drone with a cable to a laptop, we transfer the pictures, we start detection. At the moment, the processing of the photos takes place on the laptop in the field, at the scene of the action, completely offline, but according to the above method (let's say it is close to real time considering the duration of consecutive flights of one drone).
If the client has a drone that sends photos (in good quality) to the computer during the flight, we are quite easily able to adapt our application to operate in such a mode. However, this is not feasible in the current version.
_________________
CAN THE SARUAV SYSTEM BE ADAPTED TO DETECT ANIMALS, FIRE SOURCES OR OTHER OBJECTS?
Such work has not been carried out by us. The human detection system has been under development for five years, during which time both conceptual and programming work and field work have been carried out. After such a long period of research, our detectors guarantee high performance in detecting people, but we cannot directly translate their potential to identify other objects.