
Yuneec Typhoon H - programowanie trasy lotu na mapie

Każdy operator Yuneec-a Typhoon H doskonale wie, iż jego dron posiada możliwość programowania lotów autonomicznych. Jedną z takich możliwości jest tryb CCC (Curve Cable Cam) - nic innego, jak lot po wyznaczonych punktach. Do tej pory rejestrowanie ich odbywało się poprzez nadlecenie dronem w konkretne miejsce i zapisanie jego współrzędnych w pamięci aparatury ST16. Od kilku dni firma Eegalmc2 oddała do dyspozycji alternatywny (bezpłatny) sposób programowania trasy. Wszystko odbywa się za pomocą edytora dostępnego na stronie internetowej www.eegalmc2.com/us/typhoonh.
Za jego pomocą nakładamy waypoint-y w intuicyjny sposób na mapę Google. Żeby zacząć, wystarczy kliknąć w miejscu, w którym chcemy rozpocząć naszą trasę, a następnie w analogiczny sposób dodać kolejne punkty. Po zakończeniu "rysowania" naszego przelotu, warto użyć zakładki "Functions". To właśnie tam sprecyzujemy wysokość nad poziomem gruntu, na jakiej poleci dron. Pamiętajmy, iż standardową wartością jest 10 m - dla bezpieczeństwa warto ją zwiększyć do np. 40 m.

Tak zaprogramowaną trasę przelotu wgrywamy na aparaturę ST16, podłączając ją kablem microUSB. W pierwszym kroku nazywamy naszą misję oraz zapisujemy w folderze Internal storage\flightmode\mission_data). Uruchamiamy nadajnik i z prawej - dolnej części ekranu dotykowego wybieramy "TASK" i "CCC". Pomijamy krótki poradnik i w menu "LIST" zaznaczamy trasę, jaka nas interesuje. Wciskamy START.

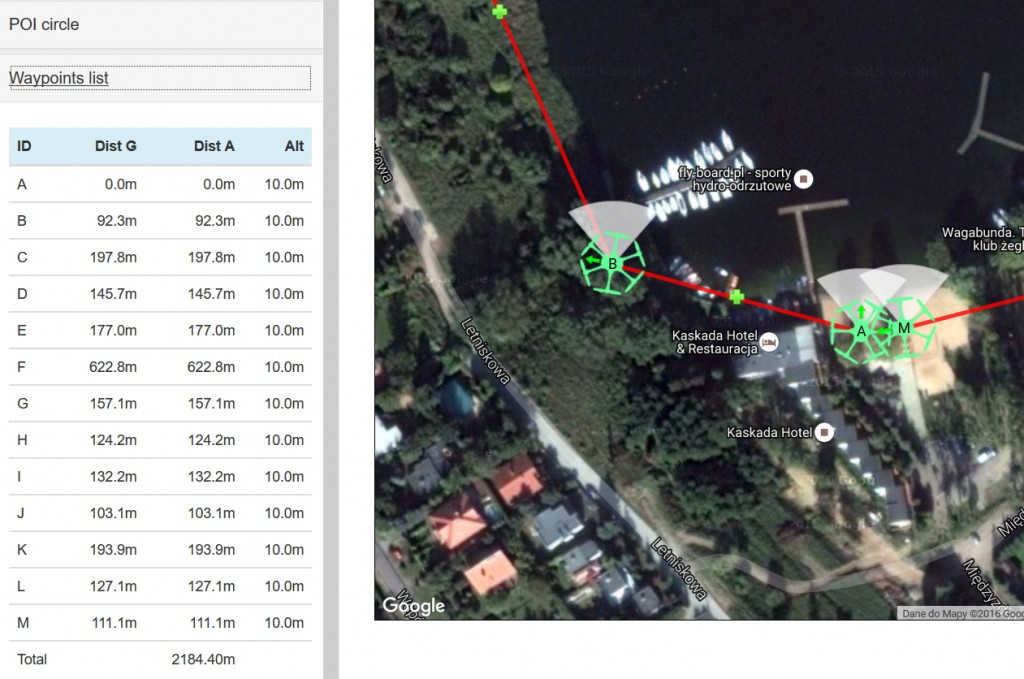
To jednak nie wszystko, na co pozwala nam edytor. Warto zwrócić uwagę na dwa dodatkowe tryby "POI focus" oraz "POI circle". Pierwszy z nich służy do zdefiniowania, w jakim kierunku ma patrzeć kamera nadlatując nad dany punkt. W celu ustalenia preferencji wybieramy "Start POI mode", klikamy na konkretny waypoint, a następnie miejsce na mapie, w które skierować ma się kamera. Podając wysokość w edytowalnym polu kamera odpowiednio ustawi także swój kąt widzenia. Tryb "POI circle" służy natomiast do wyznaczenia na mapie lotu względem danego obiektu. Programując trasę klikamy w "POI circle" oraz zaznaczamy punkt na mapie, które chcemy obserwować. Na koniec musimy jeszcze zdefiniować miejsce rozpoczęcia procedury lotu po okręgu, klikając w nie lewym przyciskiem myszy. Możemy określić, czy lot ma odbywać się zgodnie z ruchem wskazówek zegara, czy też przeciwnie. Definiujemy także wysokość procedury. Wszystko jest niezwykle intuicyjne i pozwoli na zaprogramowanie ciekawej trasy w zaledwie kilka minut.

Powyższy materiał ma charakter poglądowy. Wydawcą oprogramowania jest Eegalmc2. Instalacja i użytkowanie oprogramowania przebiega na własną odpowiedzialność operatorów.